All Projects
A collection of my work in robotics and artificial intelligence. All my projects are completely open source, designed to be easily replicated using off-the-shelf hardware and without the need for specialized machines. I believe this approach is important to democratize robotics.
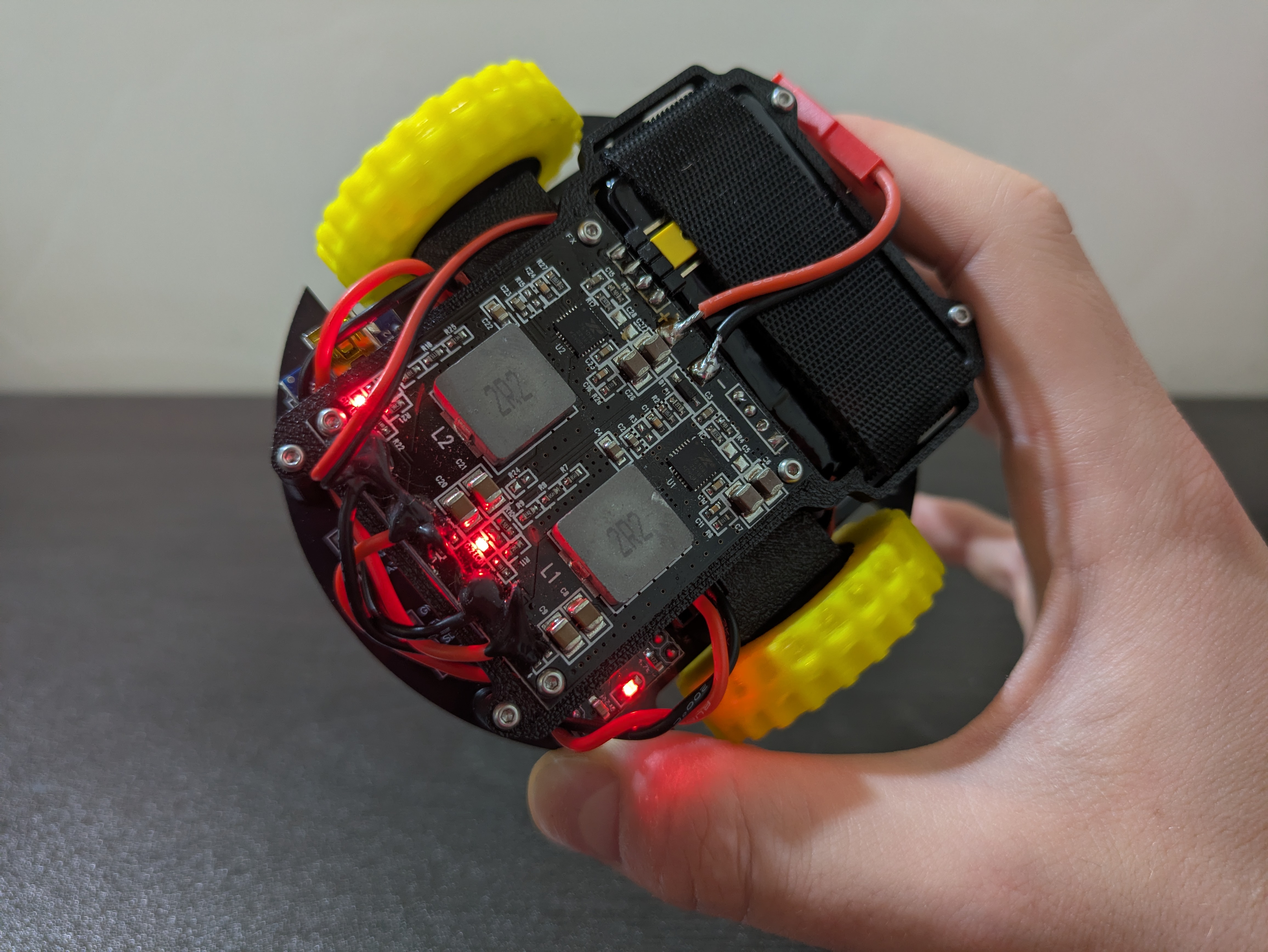
Differential Drive Robot
I wanted to deeply understand key concepts in mobile robotics and see how they translate into practice. Building a differential drive robot proved invaluable for this. I explored closed-loop RPM control for motion regulation and a two-layer hardware architecture designed to coordinate low-frequency heavy computations with low-level near-real-time motor control and sensor readings. The project was also highly educational in terms of construction, covering component selection, 3D printing, and PCB design.

Hexapod
Fully open-source six-legged robot. The architecture uses a two-tier control scheme: a Raspberry Pi handles high-level tasks like inverse kinematics and trajectory planning, while a Servo2040 manages the hardware real-time. Communication between the boards uses a custom HDLC-based protocol.

Hexapod Dashboard
I built this web-based visualizer to monitor my hexapod robot. The application automatically loads the robot's URDF model and STL meshes directly from the robot's GitHub page. It lets you connects to the robot's telemetry server via WebSocket to stream joint angles, battery voltage and servo current draw. Once connected, the simulation robot will sync pose with the real one. The interface is intentionally minimal.